Заливка и выполнение скриптов micropython на платформе ESP32/8266
Теперь, когда внутри контроллера живет micropython, можно загрузить исполняемые скрипты. Сделать это можно несколькими способами. С помощью консольной утилиты ampy
Пример использования:ampy --port COM3 put test.py эта команда загрузит в модуль файл test.pyampy --port COM3 get boot.py так можно скачать из модуля файл boot.pyampy --port COM3 ls с помощью ls можно увидеть все имеющиеся файлы.ampy так-же может создавать/удалять каталоги, удалять файлы.
У меня периодически возникали сложности с работой ampy на разных платформах, поэтому я перешёл на uPyLoader
Основные преимущества:
- Загрузка и выгрузка файлов через WiFi и COM-подключение
- Терминал для работы через WiFi и COM-подключение
- Графический интерфейс для загрузки скриптов
- Наличие версий для Windows и OS X
Интерфейс программы выглядит следующим образом, все достаточно просто и понятно
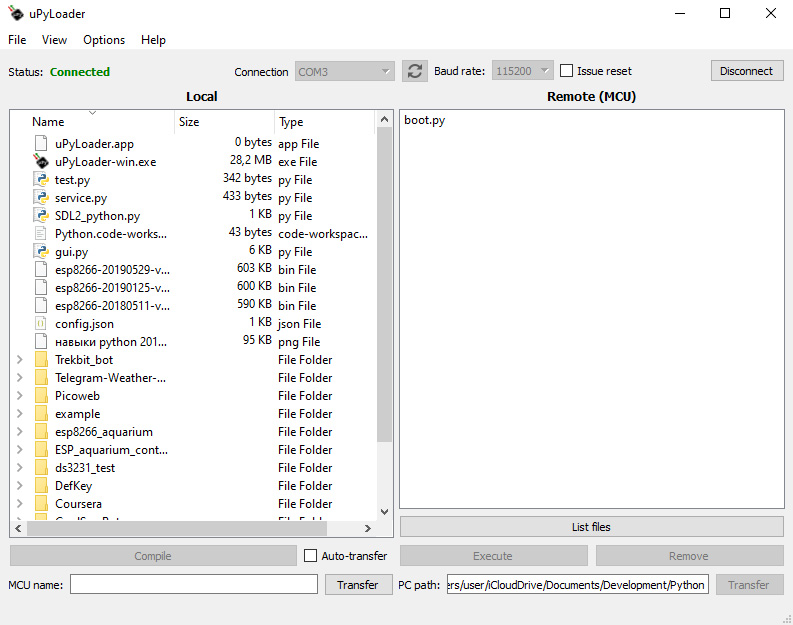
При первом подключении программа попросит инициализировать обмен, это необходимо сделать. В каталоге контроллера появятся два файла __upload.py и __download это элементы uPyLoader, трогать их не стоит.
Как видно из скрина, на контроллере имеется файл boot.py этот скрипт выполняется первым при запуске модуля. Можно его скачать и заглянуть внутрь:# This file is executed on every boot (including wake-boot from deepsleep)<br>#import esp<br>#esp.osdebug(None)<br>#import webrepl<br>#webrepl.start()
Собственно здесь имеется пояснение, что это за файл и несколько закоментированных импортов библиотек. На них пока не стоит заострять внимание.
Сейчас можно добавить несколько команд. В конец кода дописываем:string = "Hello world"<br> print(string)
Загружаем файл обратно в контролер, не забываем сделать Disconect в uPyLoader
Подключаемся с помощью putty к COM-порту и видим результат выполнения команды добавленной в boot.py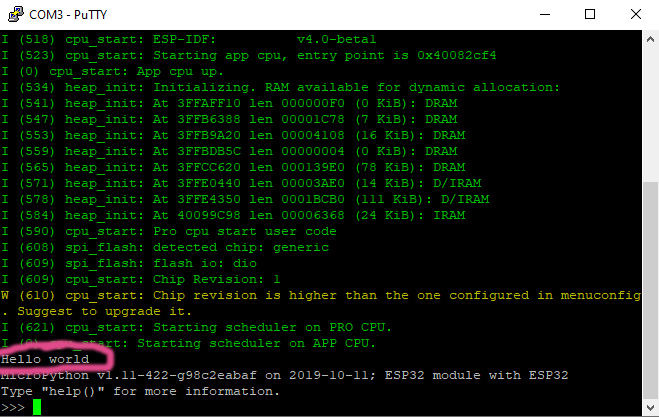
Ура, работает 🙂
Добавить комментарий